
Conforme el calentamiento global se hace más persistente en algunas zonas del mundo ha surgido la necesidad de los científicos de desarrollar nuevos instrumentos que permitan, a futuro, tener agua disponible a las personas que viven en territorios secos y de altas temperaturas.
Fue así como el inventor egipcio, Mahmoud El-Komy, de 27 años de edad, creó el robot Elu, que convierte el aire o la humedad en gotas de agua, inspirado en las misiones de la NASA en Marte.
La configuración del robot puede absorber la humedad de un terreno árido como Marte y convertirla en agua potable. El proceso se hace mediante inteligencia artificial y está acompañado de paneles solares que proporcionan energía a los dispositivos que usa. El proceso de transformación se logra, también, a través de polímeros.
Su creador aseguró que el modelo piloto de Elu le costó unos 250 dólares, mientras que otros robots similares pueden costar más al utilizar intercambiadores de calor mecánicos que además consumen más energía, según la información de Reuters.
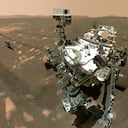
El-Komy tomó como inspiración y referencia los hitos que está logrando la agencia espacial de Estados Unidos con el rover Perseverance y su helicóptero Ingenuity. Así mismo, asegura que espera que estas agencias se fijen en este desarrollo de bajo costo que podría ser una solución en las misiones de exploración tripulada que a futuro se hagan hacia el planeta rojo.

Justamente en las últimas horas la NASA confirmó que el rover Perseverance tomó la primera muestra de un núcleo de roca perforado en el cráter Jezero de Marte. Su envase será sellado para que una futura misión lo traiga a la Tierra.
“¡Lo tengo! Con una mejor iluminación en el tubo de muestra, pude ver que el núcleo de roca que recogí todavía está allí. A continuación, procesaré esta muestra y sellaré el tubo”, confirmó la cuenta en Twitter de la misión.
En las imágenes iniciales descargadas después del evento histórico se pudo observar una muestra intacta presente en el tubo después de la extracción. Sin embargo, las imágenes adicionales tomadas después de que el brazo completase la adquisición de la muestra no fueron concluyentes debido a las malas condiciones de luz solar. El 5 de agosto, un primer ensayo de recogida de muestras fracasó al no quedar nada en el interior del recipiente cuando se tomaron imágenes.
#SamplingMars is underway. I’ve drilled into my rock target, and my team will be looking at more data and images to confirm if we were able to get and retain an intact core.
— NASA's Perseverance Mars Rover (@NASAPersevere) September 2, 2021
Latest images: https://t.co/Ex1QDo3eC2 pic.twitter.com/OqezgznnPi
El sistema de muestreo y almacenamiento en caché de Perseverance utiliza un taladro de percusión giratorio y una broca hueca en el extremo de su brazo robótico de 2 metros de largo para extraer muestras un poco más gruesas que un lápiz. Dentro de la barrena durante la extracción de núcleos hay un tubo de muestra.
Después de completar la extracción, Perseverance maniobró el descorazonador, la broca y el extremo abierto del tubo de muestra para obtener la imagen del instrumento Mastcam-Z del rover. El objetivo del intento de recolección de muestras fue una roca del tamaño de un maletín que pertenece a una línea de cresta que tiene más de 900 metros de largo y contiene afloramientos rocosos y cantos rodados.
El conjunto inicial de imágenes de Mastcam-Z mostró una parte del núcleo de una roca dentro del tubo de muestra. Después de tomar estas imágenes, el rover inició un procedimiento llamado “percusión para ingerir”, que hace vibrar la broca y el tubo cinco veces durante un segundo.

El movimiento está diseñado para limpiar el borde del tubo de muestra de cualquier material residual. Esto también puede ayudar a que la muestra se deslice más hacia el interior del tubo.
Una vez que el rover terminó este procedimiento, tomó un segundo conjunto de imágenes con la cámara Mastcam-Z. En estas imágenes, la iluminación es deficiente y las partes internas del tubo de muestra no son visibles. Las nuevas imágenes con mejor luz han confirmado que la toma de muestras ha sido un éxito.